





Object localization utilizing 3D point cloud clustering approach
Megjelenés:
Procedia CIRP, 53rd CIRP Conference on Manufacturing Systems
Kötetszám, év:
93
Év:
2020
Vonatkozó oldalak:
508-513
DOI:
https://doi.org/10.1016/j.procir.2020.04.132
Publikusan hozzáférhető:
Igen
Absztrakt:
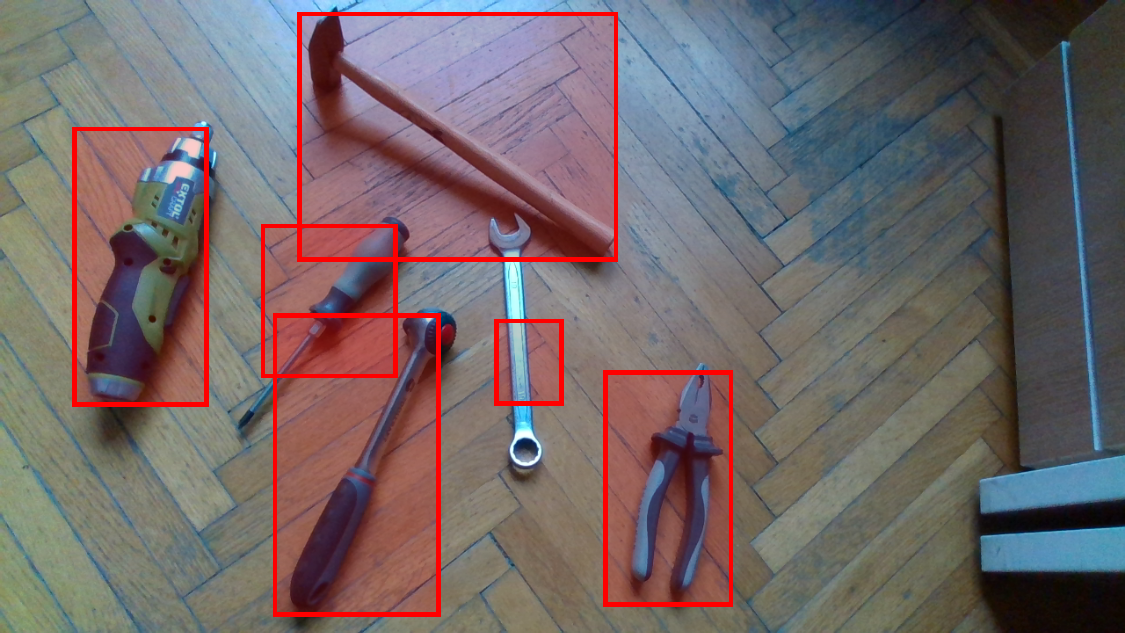
In this paper we present a novel method to recognize multiple workpieces on a flat surface,
based on a 3D point cloud and a prebuilt pose database.
First, the method identifies the main surface, which is the base of every following steps.
The surface determines the plane stretched by $X$ and $Y$ axis,
establishing the orientation of the objects on it and helping their isolated recognition.
Isolation of objects is followed by determining their specific type
and exact pose, based on the prebuilt database.
The presented method is demonstrated by recognizing workpieces and tool in an assembly cell.
Képek:
SCI:
Nem
Kiemelt:
Igen
Acknowledgement:
This research has been supported by the GINOP-2.3.2-15- 2016-00002 grant on an ”Industry 4.0 research and innovation center of excellence”. This research has been supported by the ED 18-2-2018-0006 grant on an ”Research on prime exploita- tion of the pote
Status:
beküldött
Pdf:
Igen